
























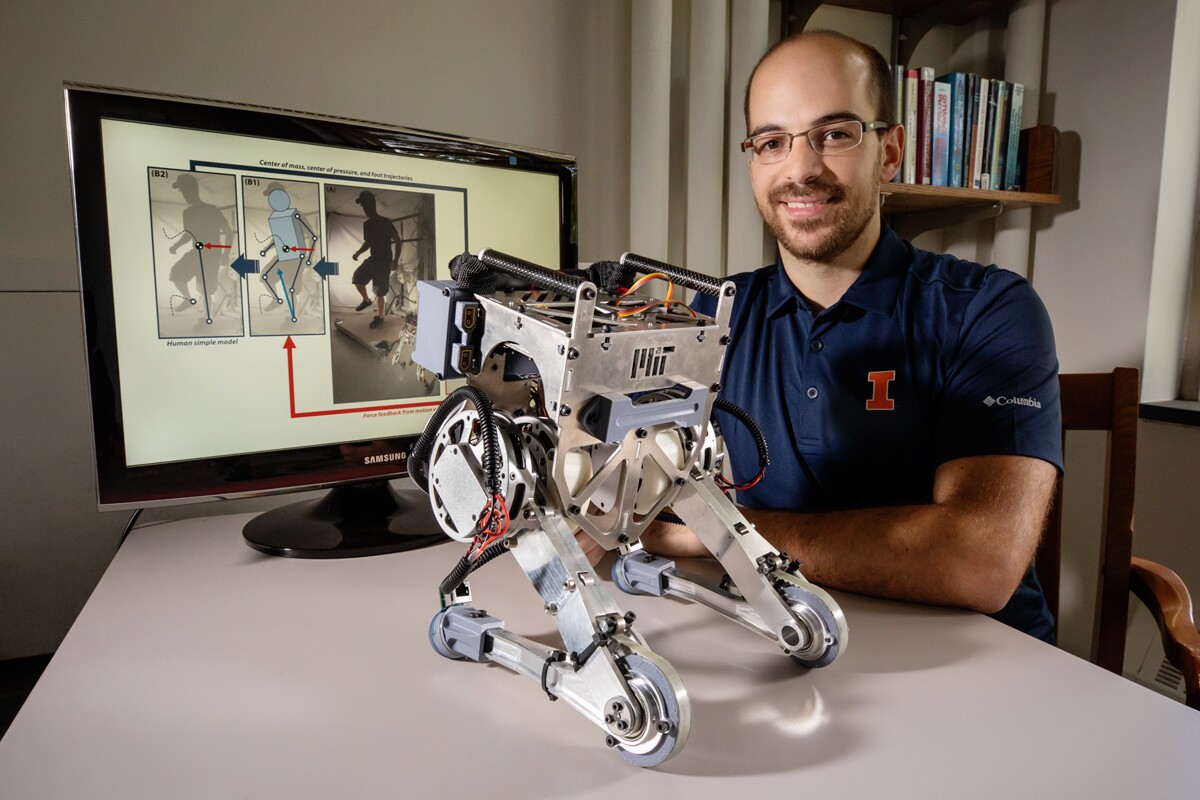
Los ingenieros del MIT y la Universidad de Illinois en Urbana-Champaign están desarrollando un robot teleoperado que utiliza un chaleco de operador especial para darle equilibrio y reflejos similares a los humanos. Llamado Mecanismos Robóticos y Sistema Electromecánico de Alta Eficiencia (HERMES), el robot bípedo a pequeña escala es un tercio del tamaño de una persona adulta y puede correr, saltar y moverse principalmente en sincronía con el operador.
Cuando se trata de hacer frente a desastres, los robots tienen muchas atracciones obvias como socorristas y rescatadores, pero aún queda un largo camino por recorrer antes de que veamos a los bomberos robóticos humanoides corriendo hacia edificios derrumbados en llamas. Uno de los mayores problemas es que, aunque los robots de hoy en día pueden correr, saltar y dar volteretas como un artista de parkour, siguen siendo terribles en el equilibrio.
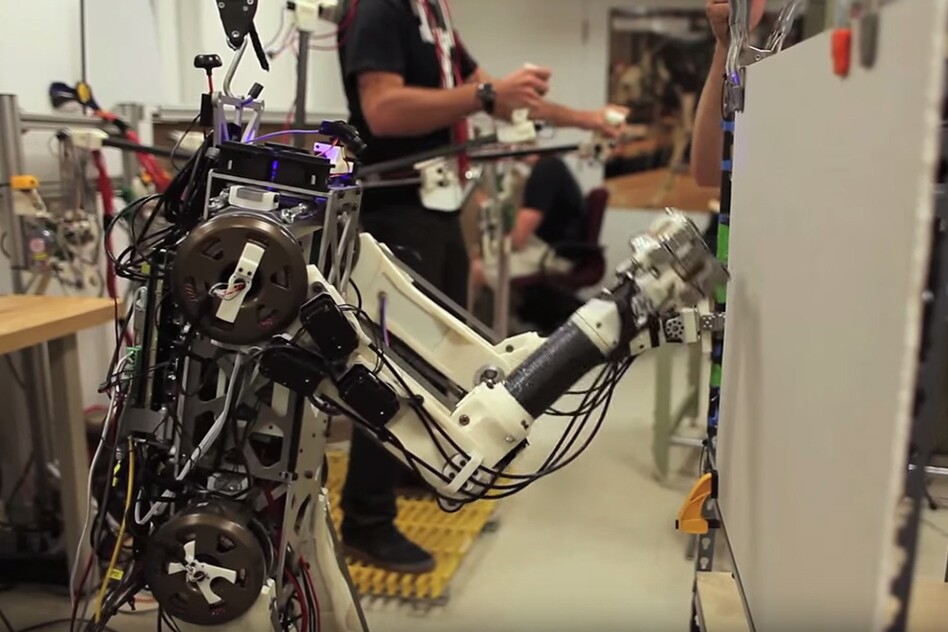
Entonces, si un robot bípedo intenta algo como forzar la apertura de una puerta, es muy probable que simplemente se resbale y termine en el piso.
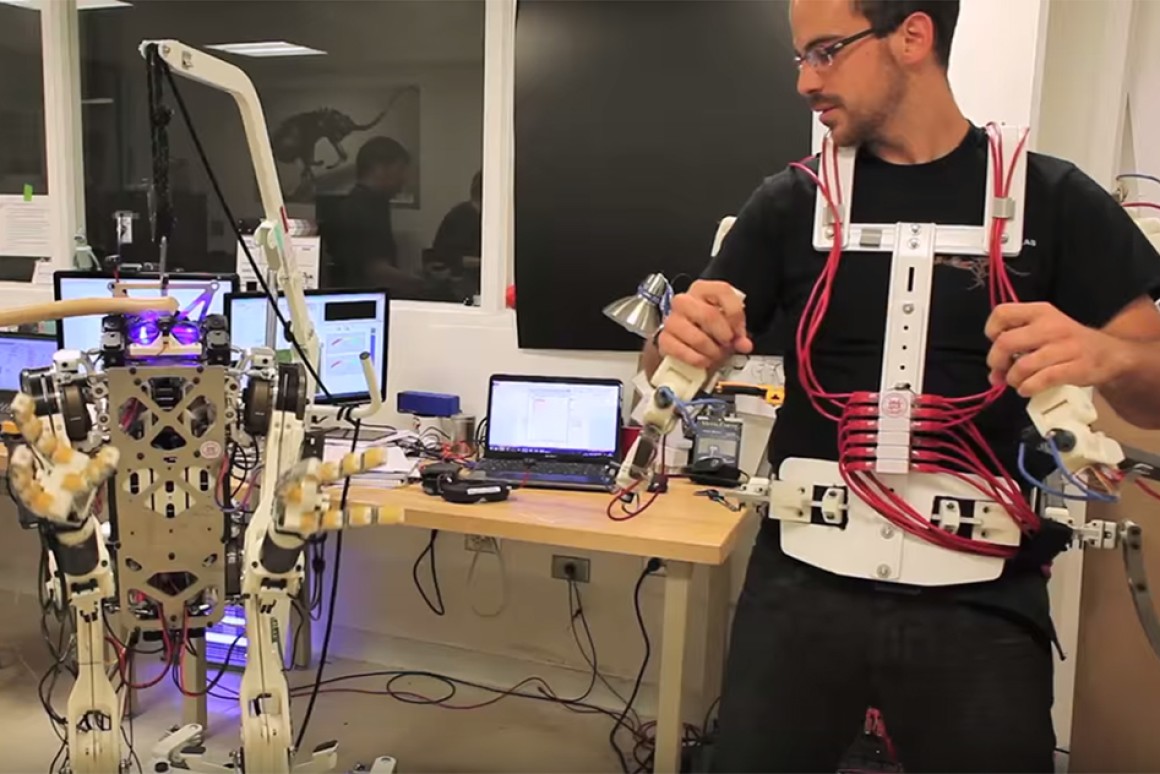
La clave de Little HERMES es un mecanismo de retroalimentación forzada. El operador usa un chaleco que no solo hace que el robot se mueva en sincronía con el operador, sino que también le permite sentir las fuerzas que trabajan en el robot casi en tiempo real y reaccionar instintivamente, compartiendo el sentido humano del equilibrio con la máquina.
La clave para esto es un chaleco usado por el operador que empuja y tira mientras el robot pierde el equilibrio. En tales circunstancias, el operador compensa reflexivamente y también lo hace la máquina.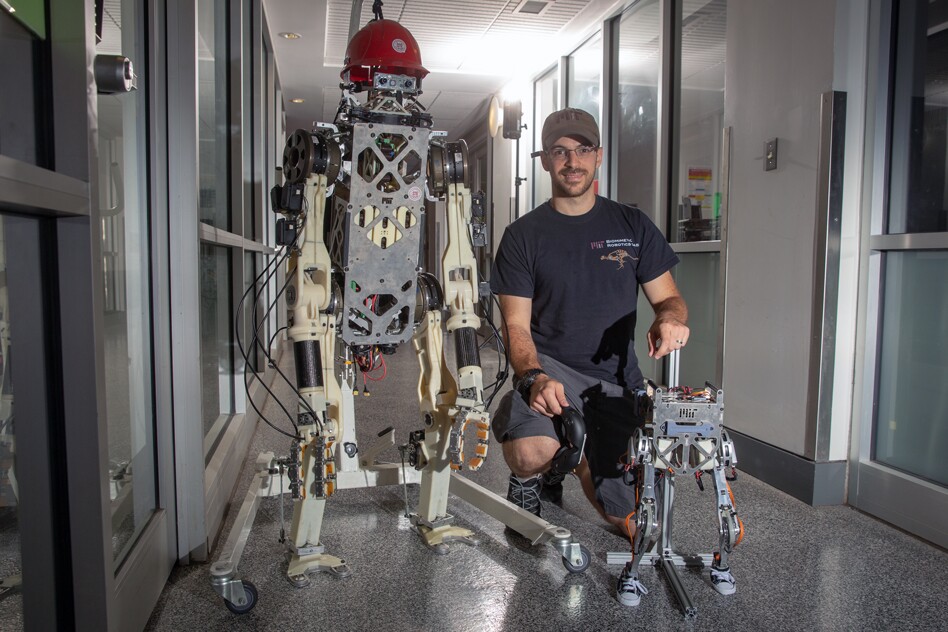
Esto significa que no solo puede caminar y pararse con más confianza, sino también prepararse para empujar o usar una herramienta. “Si el robot comienza a caer, el operador siente un empujón en esa dirección a través del chaleco”, dijo Ramos. “Naturalmente, la reacción del operador es dar un paso para equilibrarse, y el robot hace lo mismo, sincrónicamente, evitando que se vuelque”. Actualmente, Little HERMES funciona mediante control de cable directo, aunque el siguiente paso es introducir el control inalámbrico y expandir el alcance de la tecnología de retroalimentación forzada.





{kind=link}